
ISoIRS 2025
2025 5th International Symposium on Intelligent Robotics and Systems (ISoIRS 2025) has been successfully held in Chengdu, China, from June 13-15, 2025. The event was technically co-sponsored by IEEE and IEEE Chengdu Section, and organized by University of Electronic Science and Technology of China, Zhengzhou University of Light Industry and Tongji University, and hosted by School of Automation Engineering, University of Electronic Science and Technology of China, and co-organized by Huazhong University of Science and Technology and Hubei University of Arts and Science.
Group Photo

Host

Assoc. Prof. Lufeng Chen
University of Electronic Science and Technology of China, China
Opening Ceremony


Prof. Hong Cheng Prof. Liangwen Wang
University of Electronic Science and Technology of China, China Zhengzhou University of Light Industry, China
Keynote Speech


Prof. Hong Cheng, University of Electronic Science and Technology of China, China
Speech Title: Universal (Humanoid) Robots and Their Applications
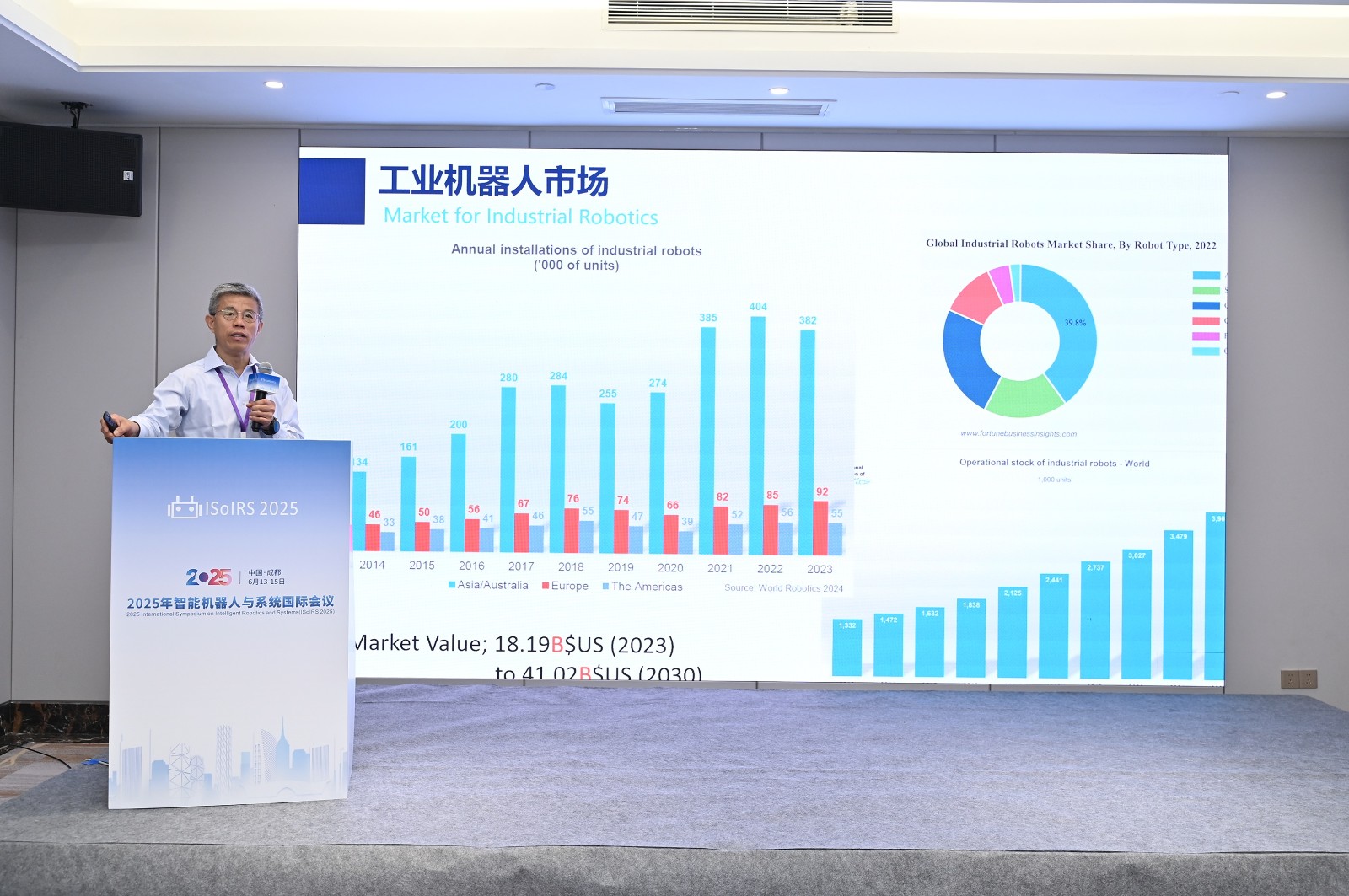
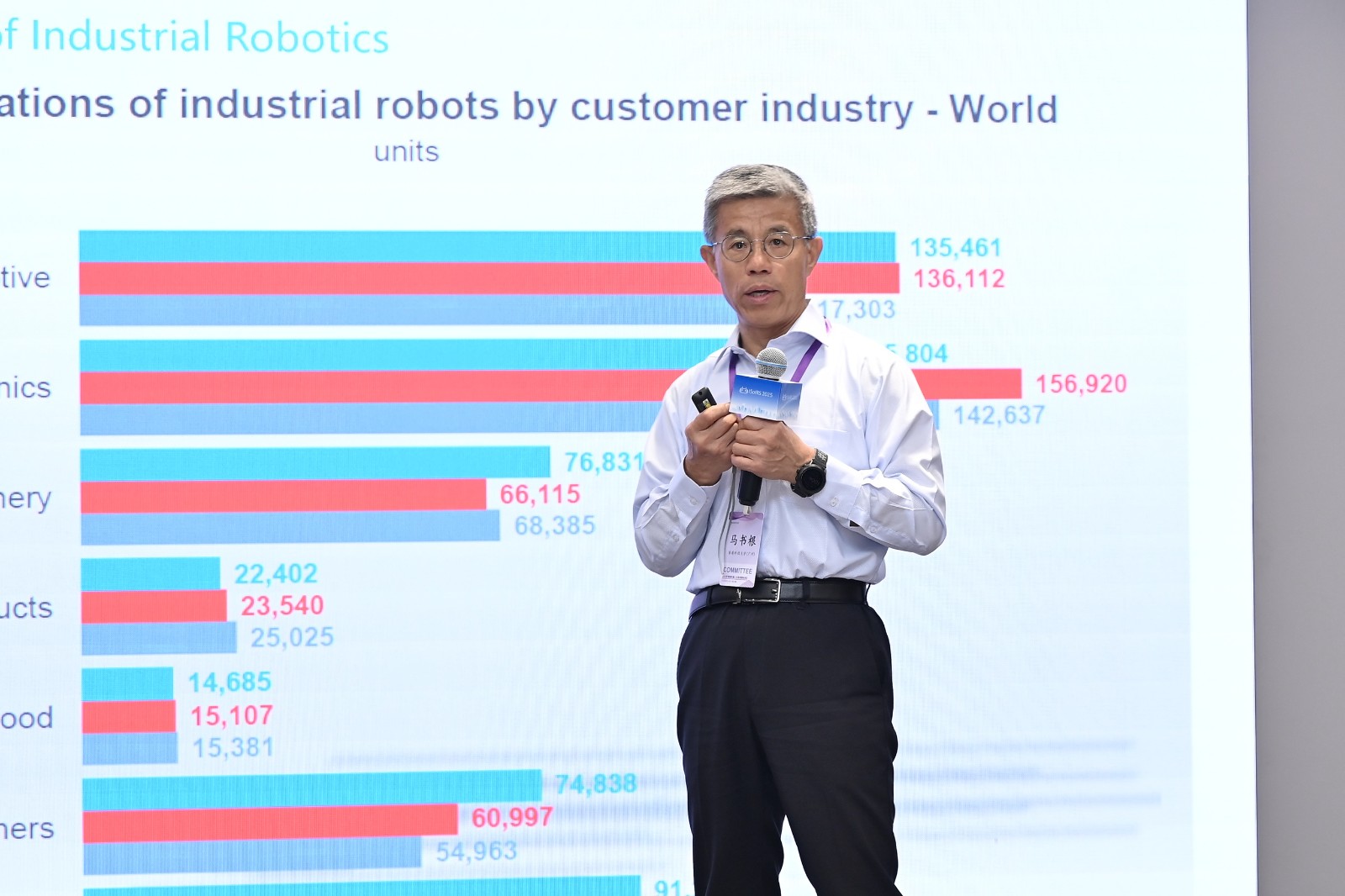
Prof. Shugen Ma, The Hong Kong University of Science and Technology (Guangzhou), China
Speech Title: From Study of Biomimetic Robotics to Design of Environment-Adaptive Robots


Prof. James Tin-Yau KWOK, Hong Kong University of Science and Technology, China
Speech Title: Vision-Language Models: Tuning and Trustworthiness
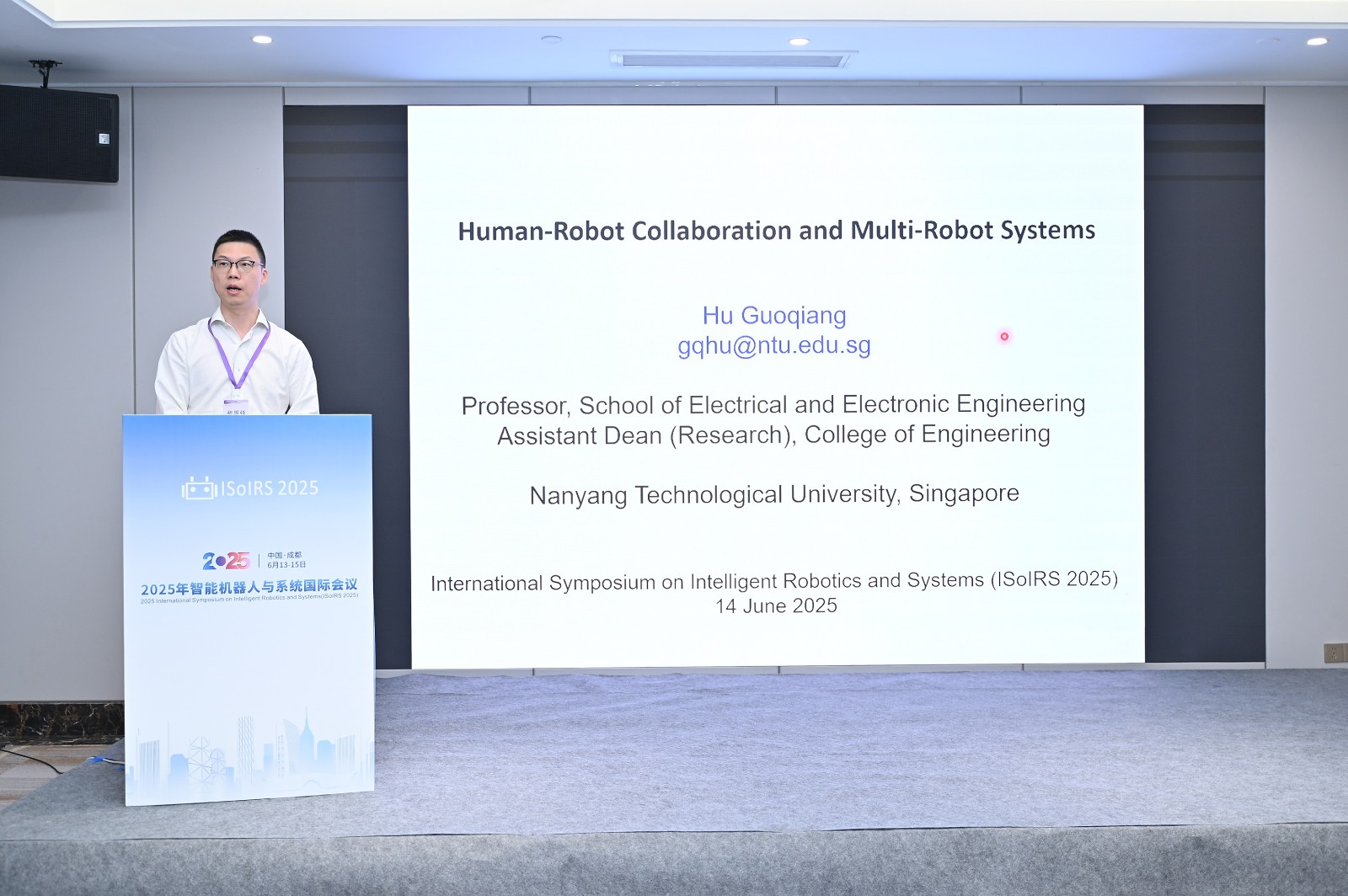

Prof. Guoqiang Hu, Nanyang Technological University, Singapore
Speech Title: Multi-Robot Systems and Human-Robot Collaboration
Invited Speech
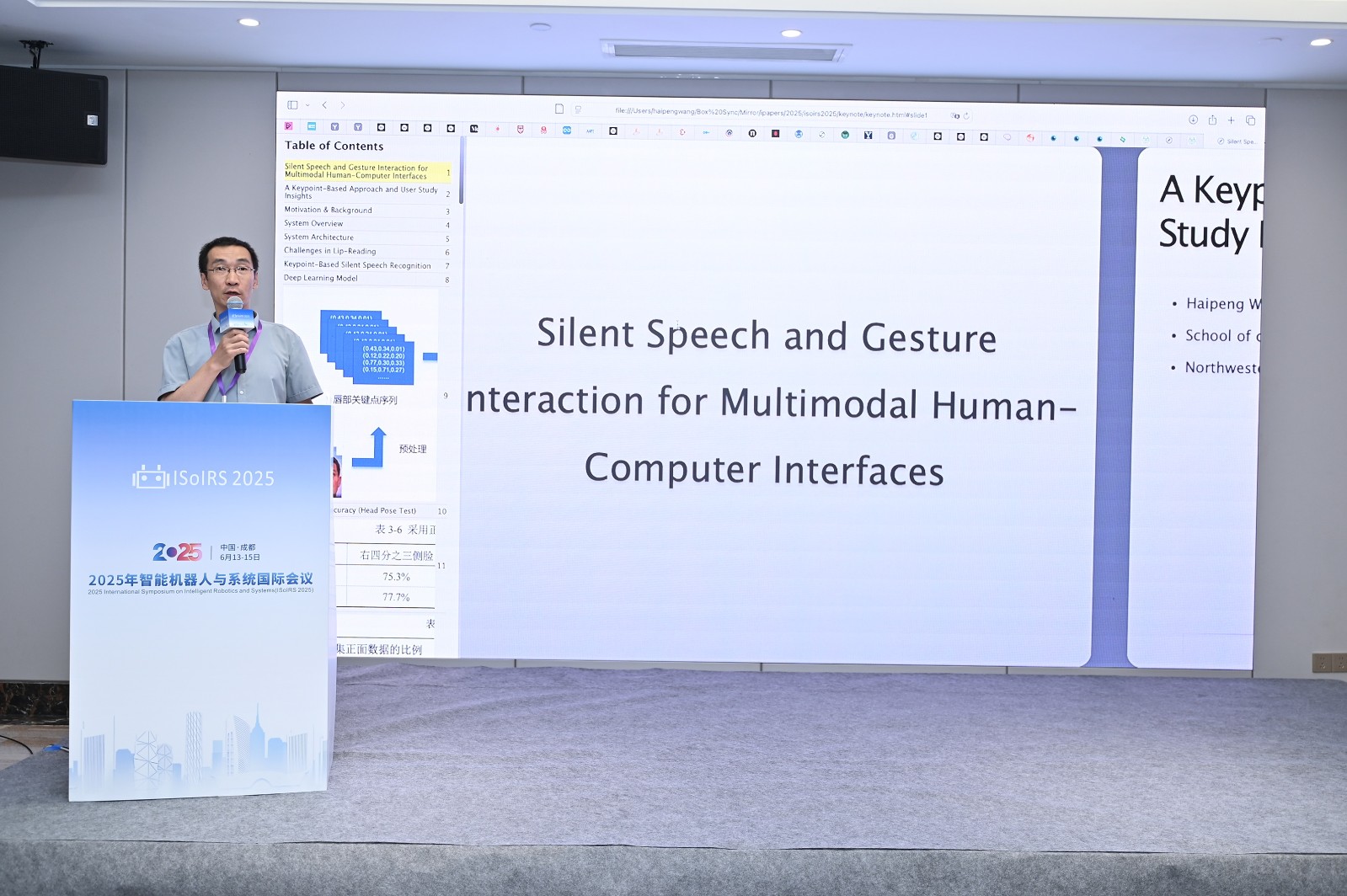

Assoc. Prof. Haipeng Wang, Northwestern Polytechnical University, China
Speech Title: Silent Speech and Gesture: A New Frontier in Multimodal Interaction
Oral Presentation



Best Paper Awards
(IR007) Title: A Stagewise Reinforcement Learning Approach for Autonomous Operation of Blood Gas Analyzer
Authors: Haiyang Jiang, Hang Wu, Kai Wang, Tong Liu, Yingrui Chen, Jiabao Song, Zequan Zeng, Yan Lin
(IR012) Title: Intelligent Optimization Research on PDC Cutter Structural Parameters Based on CPO-SVR Surrogate Model
Authors: Hengsheng He, Liangwen Wang, Zhiling Xiao, Liang Si, Songhao Hu, Tianyun He
(IR043) Title: A Binocular-Based Underwater 3-D Scanning Reconstruction Method Considering Multilayer Refraction
Authors: Jinhua Zhang, Wenlong Li, Wei Xu, Rui Chen, Wenpan Li
(IR1005) Title: A Clutching Method for Switching Interaction Modes Driven by Natural Mid-Air Gestures
Authors: Haipeng Wang, Zixing Fu, Yan Ge